Android SDK 文档¶
SDK API说明¶
IvAccountManager注册登录影创账号类¶
构造方法:
public IvAccountManager(Activity context)
常量:
public static final int REQUEST_ACCOUNT_MANAGER = 101; //打开注册登录应用程序的请求码
方法:
public String getSystemAccount() //获取影创账号
public void loginAndRegister() //注册和登录影创账号
public void onActivityResult(int requestCode, int resultCode, Intent data) //注册登录返回结果处理
public void setCallback(Callback callback) //设置注册登录回调
IvAccountManager.CallbackIvAccountManager回调接口¶
接口:
void onLoginSuccess(String accountName)//登录成功,参数为账号
void onLoginFailed(String msg)//登录失败,参数为失败信息
IvDeviceManager眼镜控制类¶
构造方法:
public IvDeviceManager(Context context)
方法:
public void onResume() //恢复状态,与activity周期onResume一致。
public void onPause() //暂停状态,与activity周期onPause一致。
public void system3DSwitch(boolean open) //系统2D/3D模式切换,open为turn,切换到3D模式,open为false,切换到2D模式
IvHeadPoseManager眼镜陀螺仪位置信息¶
构造方法:
public IvHeadPoseManager(Context context)
方法:
public void onResume() //恢复状态,与activity周期onResume一致
public void onPause() //暂停状态,与activity周期onPause一致
public void onDestroy() //退出注释资源,与activity周期onDestroy一致
public float[] getOrientationArray() //获取头部姿态矩阵参数
public void resetGyroData(boolean bX, boolean bY, boolean bZ) //重置陀螺仪数据
IvHandShankManager手柄控制类¶
构造方法:
public IvHandShankManager(Context context)
方法:
public void onResume() //恢复状态,与activity周期onResume一致
public void onPause() //暂停状态,与activity周期onPause一致
public void onDestroy() //退出注释资源,与activity周期onDestroy一致
public boolean handShankConnected() //蓝牙手柄是否已连接
public void handShankMouseMode() //手柄切换到鼠标模式
/*
手柄2D/3D模式切换,上报3dof数据,点击报F12
open为turn,切换到3D模式,上报3dof数据,点击报F12
open为false,切换到2D模式,上报上下左右确定DPAD事件
*/
public void handShank3DSwitch(boolean open)
public void enable3Dof(boolean enable) //设置手柄是否打开3dof数据,仅在3D模式下有效
public void enableACC(boolean enable) //设置手柄是否打开ACC(重力加速度)数据,仅在3D模式下有效
public void enableGYRO(boolean enable) //设置手柄是否打开GYRO(陀螺仪)数据,仅在3D模式下有效
public void setHandShankConnStateCallback(HandShankConnStateCallback handShankConnStateCallback) //设置手柄连接状态回调
public void setHandShankGYROCallback(HandShankGYROCallback handShankGYROCallback) //设置手柄GYRO(陀螺仪)回调
public void setHandShankACCCallback(HandShankACCCallback handShankACCCallback) //设置手柄ACC(重力加速度)回调
public void setHandShank3DofCallback(HandShank3DofCallback handShank3DofCallback) //设置手柄3dof回调
IvHandShankManager.HandShankConnStateCallback手柄连接状态回调接口¶
接口:
void onConnectionStateChange(boolean connected) //手柄与眼镜连接或者断开时回调
IvHandShankManager.HandShank3DofCallback3dof手柄姿态数据)回调接口¶
接口:
void onDataChanged(float[] value) //数据回调,value为长度为16姿态数据
IvHandShankManager.HandShankACCCallback手柄ACC(重力加速度)回调接口¶
接口:
void onDataChanged(float[] value) //数据回调,value为三轴上的分量
IvHandShankManager.HandShankGYROCallback手柄GYRO(陀螺仪)回调接口¶
接口:
void onDataChanged(float[] value) //数据回调,value为三轴上的分量
Android ADK使用教程¶
开发工具IDE¶
Android studio 3.0
基本事件监听EventListener¶
该项介绍系统DPAD件事和焦点问题,可参考实例FocusDemo。该项与sdk无关,已熟悉可跳过该项。
1.tp与手柄(2D模式)滑动事件
眼镜侧边TP与手柄上报五个事件:向上滑(手柄上边区域可点击),向下滑(手柄下边区域点击),向左滑(手柄左边区域点击),向右滑(手柄右边区域点击),中间点击;分别报事件
KeyEvent.KEYCODE_DPAD_UP;//code:19
KeyEvent.KEYCODE_DPAD_DOWN;//code:20
KeyEvent.KEYCODE_DPAD_LEFT;//code:21
KeyEvent.KEYCODE_DPAD_RIGHT;//code:22
KeyEvent.KEYCODE_DPAD_CENTER;//code:23
该事件直接报给系统,应用程序只须处理系统事件。类似控制器操作。
2.焦点处理
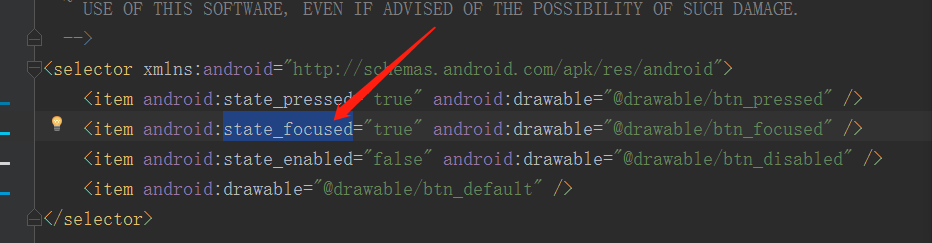
通过滑动切换控件焦点来显示控件是否被选中:
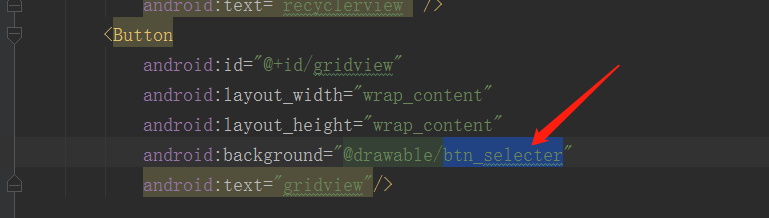
btn_selecter.xml
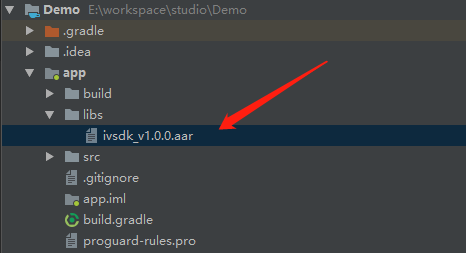
初始化SDK¶
将sdk文件ivsdk_v1.0.0.aar放到我们项目的libs文件夹下,就是和jar放在同一个文件夹下:
打开主项目下的build.gradle构建文件:
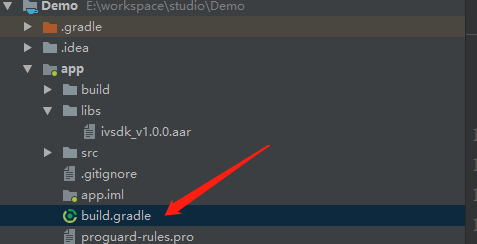
将aar包引入项目中:
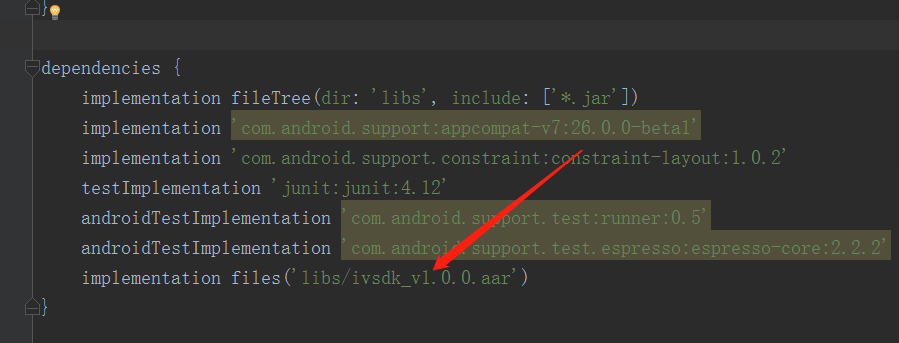
Rebuild项目,此时sdk已经成功导入。
影创ShadowCreator账号信息¶
1.初始化
// 注册登录
private IvAccountManager mAccountManager;
在onCreate中实例:
mAccountManager = new IvAccountManager(this);
2.获取系统已经登录账号信息
mAccountManager.getSystemAccount()
3.注册登录系统
设置回调,并调注册登录接口:
//设置回调
mAccountManager.setCallback(new IvAccountManager.Callback(){
@Override
public void onLoginSuccess(String accountName) {}
@Override
public void onLoginFailed(String msg) {}
});
mAccountManager.loginAndRegister();//注册或登录
在onActivityResult中接收注册登录返回信息:
@Override
protected void onActivityResult(int requestCode, int resultCode, Intent data) {
//注册登录请求直接交给mAccountManager接口来处理
if(IvAccountManager.REQUEST_ACCOUNT_MANAGER == requestCode){
mAccountManager.onActivityResult(requestCode, resultCode, data);
}
}
系统2D/3D切换¶
1.初始化及周期方法调用
// 设备 3d 切换
private IvDeviceManager mDeviceManager;
onCreate中实例:
mDeviceManager = new IvDeviceManager(this);
周期方法调用:
@Override
protected void onPause() {
super.onPause();
mDeviceManager.onPause();
}
@Override
protected void onResume() {
super.onResume();
mDeviceManager.onResume();
}
2.2/3D切换
mDeviceManager.system3DSwitch(false);// 2D
mDeviceManager.system3DSwitch(true);// 3D
headPose头部姿态¶
1.初始化及周期方法调用
// 头部位置信息
private IvHeadPoseManager mHeadPoseManager;
onCreate中实例:
mHeadPoseManager = new IvHeadPoseManager(this);
周期方法调用:
@Override
protected void onPause() {
super.onPause();
mHeadPoseManager.onPause();
}
@Override
protected void onResume() {
super.onResume();
mHeadPoseManager.onResume();
}
@Override
protected void onDestroy() {
mHeadPoseManager.onDestroy();
super.onDestroy();
}
2.头部姿态矩阵获取
mHeadPoseManager.getOrientationArray()
该数据由应用主动获取,返回为长度16的float数组,表示头部当前姿态矩阵。该数据由OpenGL绘制时使用。
handShank手柄¶
1.初始化及周期方法调用
// 手柄
private IvHandShankManager mHandShankManager;
在onCreate中实例:
mHandShankManager = new IvHandShankManager(this);
周期方法调用:
@Override
protected void onResume() {
super.onResume();
mHandShankManager.onResume();
}
@Override
protected void onPause() {
super.onPause();
mHandShankManager.onPause();
}
@Override
protected void onDestroy() {
mHandShankManager.onDestroy();
super.onDestroy();
}
2.手柄连接状态监听
判断当时手柄是否处于连接状态
mHandShankManager.handShankConnected()
设置连接状态监听
mHandShankManager.setHandShankConnStateCallback(new IvHandShankManager.HandShankConnStateCallback() {
@Override
public void onConnectionStateChange(boolean connected) {
}
});
3.模式切换
切换到鼠标模式
mHandShankManager.handShankMouseMode();
鼠标模式下,手柄仅有点击事件(指操作圆形区域事件,不包括返回键,下同),该点击报鼠标左键给系统处理,应用程序仅须处理系统点击事件。
切换到2D模式
mHandShankManager.handShank3DSwitch(false);
2D模式下,手柄上报五个事件:向上滑(上边区域点击),向下滑(下边区域点击),向左滑(左边区域点击),向右滑(右边区域点击),中间点击;分别报事件
KeyEvent.KEYCODE_DPAD_UP;//code:19
KeyEvent.KEYCODE_DPAD_DOWN;//code:20
KeyEvent.KEYCODE_DPAD_LEFT;//code:21
KeyEvent.KEYCODE_DPAD_RIGHT;//code:22
KeyEvent.KEYCODE_DPAD_CENTER;//code:23
该事件直接报给系统,应用程序只须处理系统事件。
切换到3D模式
mHandShankManager.handShank3DSwitch(true);
3D模式下,手柄3dof/acc/gyro数据下面介绍,点击事件报F12(KeyEvent.KEYCODE_F12;//code:142)给系统,应用程序只须监听处理系统F12:
@Override
public boolean onKeyUp(int keyCode, KeyEvent event) {
if(keyCode == KeyEvent.KEYCODE_F12){
//3d 手柄点击事件
}
return super.onKeyUp(keyCode, event);
}
4.3dof数据(融合后的手柄姿态数据)获取
获取该数据需要手柄3D模式,设置数据回调,打开3Dof开关:
mHandShankManager.handShank3DSwitch(true);//切换3D模式
//设置数据回调
mHandShankManager.setHandShank3DofCallback(new IvHandShankManager.HandShank3DofCallback() {
@Override
public void onDataChanged(float[] value) {
}
});
mHandShankManager.enable3Dof(true);//打开3Dof开关
onDataChanged中连续收到手柄当前姿态数据。该长度为16的float的数组表示的是手柄当前的姿态矩阵。该数据在openGL绘制时使用。
5.acc数据(加速度)获取 获取该数据需要手柄3D模式,设置数据回调,打开acc开关:
mHandShankManager.handShank3DSwitch(true);//切换3D模式
//设置数据回调
mHandShankManager.setHandShankACCCallback(new IvHandShankManager.HandShankACCCallback() {
@Override
public void onDataChanged(float[] value) {
}
});
mHandShankManager.enableACC(true);//打开ACC开关
onDataChanged中连续收到手柄当前加速度数据(包括重力加速度)。该长度为3的float的数组表示的是手柄当前xyz三轴上的加速度数据。
6.gyro数据(陀螺仪数据)获取 获取该数据需要手柄3D模式,设置数据回调,打开gyro开关:
mHandShankManager.handShank3DSwitch(true);//切换3D模式
//设置数据回调
mHandShankManager.setHandShankGYROCallback(new IvHandShankManager.HandShankGYROCallback() {
@Override
public void onDataChanged(float[] value) {
}
});
mHandShankManager.enableGYRO(true);//打开GYRO开关
onDataChanged中连续收到手柄当前陀螺仪数据。该长度为3的float的数组表示的是手柄当前xyz三轴上的陀螺仪数据。